
Adquisición de Imágenes Estéreo 📸
La visión estéreo usa dos cámaras que capturan la escena desde ángulos ligeramente distintos. En el escenario de la simulación estas cámaras se encuentran perfectamente alineadas de manera que, sus ejes ópticos son paralelos entre sí, sus planos de imagen son coplanares y las líneas epipolares son horizontales.
A esta configuración ideal se le llama canónica, y al par de imágenes que cumplen estas condiciones se les llama imágenes estéreo rectificadas. Esta alineación simplifica mucho la búsqueda de puntos correspondientes, ya que solo hay que buscar a lo largo de la misma fila en la otra imagen. En la Figura 1, se representa dicha configuración junto a sus centros ópticos, la línea epipolar resultantes y la localización tridimensional de un punto característico.
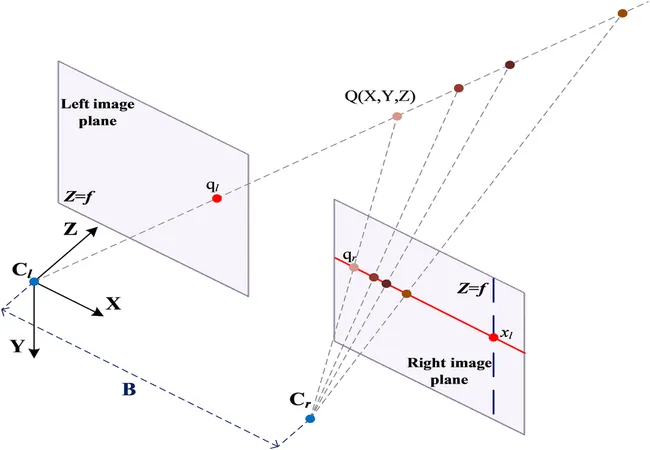 Figura 1: Geometría epipolar.
Figura 1: Geometría epipolar.
[Adil, Elmehdi & Mikou, Mohammed & Mouhsen, Ahmed. (2022). A novel algorithm for distance measurement using stereo camera. CAAI Transactions on Intelligence Technology. 7. n/a-n/a. 10.1049/cit2.12098.]
Por tanto, el primer paso constituye en extraer las imágenes correspondientes a las cámaras que observan la escena.
Python: Get Images
imageLeft = HAL.getImage('left')
imageRight = HAL.getImage('right')
Preprocesamiento y Detección de Píxeles Característicos
Una vez se tienen las imágenes extraídas, para facilitar la búsqueda de correspondencias entre ellas, se indentifican puntos caracterósticos. Este paso, aplica el detector de bordes Canny a las imágenes resaltando los píxeles donde hay cambios bruscos de intensidad, correspondientes a los contornos de los objetos.
Python: Canny Filter
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
img_canny = cv2.Canny(image_gray, l_thr, h_thr)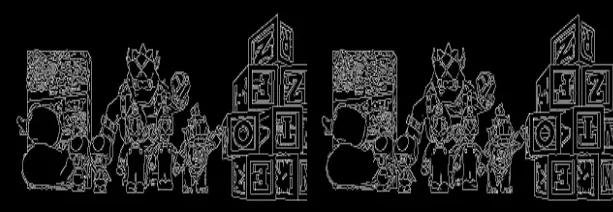
Los pixeles resaltados en blanco se consideran píxeles característicos y serán los puntos a localizar en la otra imagen para obtener la reconstrucción tridimensional.
Establecimiento de la Geometría Epipolar
Tras la obtención de los pixeles característicos se deben aplicar los conceptos de geometría epipolar para poder proyectar la línea epipolar sobre la imagen derecha. Para ello, se seguirán los pasos descritos a continuación.
- Conversión de coordenadas (gráfico a óptico): Se transforma las coordenadas de la imagen del píxel de interés al sistema de coordenadas óptico de esa cámara.
- Retroproyección (2D a 3D): El punto 2D se retroproyecta hacia el espacio 3D, generando una recta epipolar en 3D que se origina en el centro óptico de la cámara y pasa por el punto de interés.
- Proyección en la imagen derecha (3D a 2D): La recta epipolar se proyecta sobre el plano imagen de la otra cámara. Como resultado se obtiene la recta epipolar del pixel de interés definida en la imagen derecha.
- Conversión de coordenadas (óptico a gráfico): La recta 2D proyectada se convierte del sistema óptico de la cámara derecha a coordenadas de píxel.
- Creacción de la franja epipolar: Con el objetivo de facilitar la búsqueda de correspondencias, se determina un rectángulo de 7 píxeles de altura que contiene todos los píxeles de la línea epipolar dibujada.
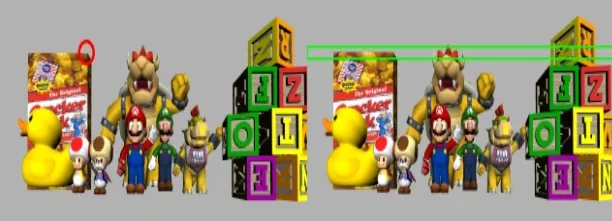
Búsqueda de Correspondencias
Después de definir la franja epipolar, se procede a la búsqueda del homólogo, el cual se espera encontrar dentro de dicha franja. Se extrae un parche alrededor del punto de interés original, que actuará como plantilla. Luego, se extrae la región correspondiente a la franja epipolar de la imagen derecha.
Mediante cv2.matchTemplate con el método de Correlación Cruzada Normalizada, se desliza la plantilla izquierda sobre la franja derecha, buscando la zona de máxima similitud.
Python: Homologue Search
# Parche en imagen epi derecha
patch_r = imageRight[y_epi_min:y_epi_max + 1,
x_epi_min:x_epi_max + 1]
# Parche en imagen izquierda
patch_l = imageLeft[y_px - block_size//2:
y_px + block_size//2 + 1,
x_px - block_size//2:
x_px + block_size//2 + 1]
# Búsqueda de homólogo
res = cv2.matchTemplate(patch_r, patch_l, cv2.TM_CCORR_NORMED)
_, max_val, _, max_loc = cv2.minMaxLoc(res)La ubicación que devuelve el valor máximo de correlación dentro de esa franja se considera la posición del punto homólogo en la imagen derecha. Además, se define un umbral de rechazo por debajo del 0.9 para descartar aquellas correlaciones ruidosas o erróneas.
Triangulación y Generación de la Nube de Puntos Tridimensional
La triangulación es el paso final para obtener las coordenadas 3D de un punto de la escena una vez que se ha encontrado su correspondencia en ambas imágenes. Se parte de las posiciones 3D de los centros ópticos de las cámaras y de los vectores directores que definen los rayos 3D desde cada centro hacia el punto característico en su respectiva imagen.
Idealmente, estos rayos se cruzarían en el punto 3D buscado, pero en la práctica, debido a errores, no se suelen cortar. De tal forma, se calcula el punto 3D de distancia mínima entre ambas rectas.
R_{left} = c_l + t * v_1
R_{right} = c_r + s * v_2
w_0 = c_r - cl
Para encontrar los puntos en cada recta que minimizan la distancia entre ellas, se imponen las condiciones basadas en la ortogonalidad del vector que une dichos puntos con respecto a las direcciones de las rectas. Esto conduce al siguiente sistema de ecuaciones.
t(v_1 · v_1) - s(v_1 · v_2) = -(v_1 · w_0)
t(v_1 · v_2) - s(v_2 · v_2) = -(v_2 · w_0)
Una vez obtenidos t y s, se calculan los puntos en cada recta y la estimación final de la coordenada 3D se toma como el punto medio del segmento los une.
Para minimizar los outliers se situa un umbral de error en 10 milímetros, descartando todas aquellas distancias mayores de estas.
